GPS
The GPS is a passive, satellite-based navigation system maintained and operated by the U.S. Department of Defense. Its primary purpose is to provide global positioning and navigation for land-, sea-, and air-based tactical forces?but it has also been made available for commercial use. Until May 2000, a selective availability mask distorted the satellite clock signals to reduce the accuracy available for commercial applications. Now that this has been removed, the accuracy of GPS is between 5 and 40 meters, provided the GPS receiver has a clear view of the sky.
How GPS Works
Absolute positioning is the fastest and most common use of GPS for real-time navigation (see Figure 5.4). GPS receivers are range measurement devices that measure the distance between the receiver antenna and various satellites, and determine the position of the receiver by the intersection of the range vectors. This is similar to the method used in time of arrival. A simplified two-dimensional model shows the location at the intersection of three range circles. The circles represent spheres in space and the center is the satellite (see Figure 5.5).
Figure 5.4. GPS Absolute Positioning.
Figure 5.5. GPS Positioning Based on Time of Arrival Principles.
Faster and more accurate positioning methods have been developed that involve postprocessing, network assistance, and relative or differential positioning. These methods are known as differential GPS (D-GPS) and assisted GPS (A-GPS). D-GPS uses relative positions to correct position estimates and can be accurate to within 1 meter. A-GPS uses a GPS reference network to accelerate and improve accuracy of positioning.
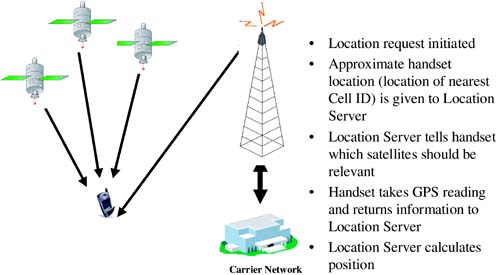
A-GPS
The idea behind A-GPS is that a wide area differential GPS network is set up with receivers that operate continuously and have a clear view of the sky. This network is connected to the GSM network, and when a mobile device requests a position fix, assistance data from the reference network is transmitted to enhance the performance of the GPS receiver (see Figure 5.6).
Figure 5.6. A-GPS.
The information from the GPS reference network can enhance several aspects of the positioning performance. The A-GPS process allows the GPS sensor to initialize and locate satellites much faster, it increases the accuracy of the positioning, and it requires less power than a standard GPS system. Additional information can also be given to the GPS sensor from the network to further improve performance, including differential GPS corrections and base station location. A time to first fix in standard GPS can take as long as 10 minutes, as a GPS receiver that does not know where it is has to search the entire frequency space (?4 kHz to 4 kHz) and the entire code phase space (1 to 1,023 chips) to locate visible satellites.
A-GPS requires both a GPS receiver in the handset and a reference GPS network that can provide information to assist the GPS receiver in the positioning process. Commercially available solutions are available from Ericsson (http://www.ericsson.com), Sirf (http://www.sirf.com), and SnapTrack, a Qualcomm company (http://www.snaptrack.com).
Augmenting GPS With Dead Reckoning
Dead reckoning, also know as inertial navigation, is a technique often used in vehicle navigation to improve the accuracy and reliability of positioning when using GPS. Dead reckoning uses speed and direction sensors to calculate position based on the last known position. It works well when GPS signals are blocked by tunnels and when GPS signals are either blocked or reflected by tall buildings in dense urban areas.







