Mobile Positioning Techniques
Mobile Positioning Techniques
Before location-based solutions can be created, we first have to be able to get the location of the mobile user. Many technologies are in place that can provide this information. Deciding which technology to use will usually be based on a combination of accuracy and cost. In most cases, as the required level of accuracy increases, so does the cost. This cost is usually shared between the mobile user and the wireless carrier. Developers typically have to rely on the information provided to them from the handset and the carrier, precluding their ability to directly influence the accuracy of the location information.
In most cases, the location accuracy depends on the type of positioning technology being used. There are network-based solutions that can be implemented by wireless carriers to provide position information for both new and legacy handsets. These solutions are quite cost-effective, although their accuracy is often not ideal; they range from several hundred meters (or yards) to several kilometers (or miles) depending on the solution. Handset-based solutions can dramatically improve the accuracy, although they introduce significant costs for both the handset manufacturers and network operators. With these solutions, it is possible to get location information that is within meters (5 to 10 feet) of the user's position. In many cases, a mixed solution is the best approach, with the handsets and networks working together to provide a solution with acceptable accuracy at a reasonable cost.
The objective of all positioning technologies is to capture the location of a mobile device and convert it into a meaningful X, Y coordinate. This section describes the leading methods for accomplishing this task.
Network-Based Solutions
One way to locate a mobile user is to use the fixed-base stations that comprise the wireless carrier's network. Each of these stations contains radio intercept equipment that can receive a signal from any active phone. By taking the signals from one or more base stations, the location of the mobile user can be determined. In general, the more base stations that are used, the more accurate the location information will be.
Network solutions can work with existing handsets, making them an ideal first step in providing location information. Carriers are expected to use network-based solutions to meet the FCC E911 Phase II requirements for legacy handsets.
Cell Identity
Cell identity is the most simplistic and cost-effective way to provide position information. It simply determines which cell of a wireless network the device is using and reports its location. Since the base station for each cell is in a fixed location, the cell identity can easily be translated into a location for the mobile user. The downside of this approach is that the user's precise location within the cell is unknown. This method typically provides location information accurate within a kilometer or two (about one mile) which may be acceptable for getting a general idea of where the user is located, but does not provide terribly useful information for emergency services or tracking, let alone targeted advertising or driving instructions.
Fortunately, there are ways to improve the accuracy of cell identity. Some cells are divided into sections, thereby reducing the total area of the possible location. This can often reduce the area cross-section by two-thirds. For example, if the total area of one cell is four square kilometers, the location of a user is limited to that area. If, however, that cell can be identified in sections one-third the size, then the area where that particular user is located can be reduced to under one-and-a-half square kilometers.
To get an even more accurate reading on the location, a technique called timing advance (TA) can be used. TA provides a way to find out how far a user is away from the base station, thereby dramatically reducing the possible locations for that user. The information is not exact, but it does improve the overall accuracy of using cell identity for determining a user's position. Unfortunately, TA information is not easy to obtain without access to a mobile positioning center (MPC). An MPC can provide more detailed position information using a defined API. Developers can write applications that talk to the MPC to get the TA information along with cell identity. Figure 17.1 shows the accuracy for the various positioning techniques using cell identity and timing advance. The shaded areas in the diagrams represent the possible locations for the mobile user.
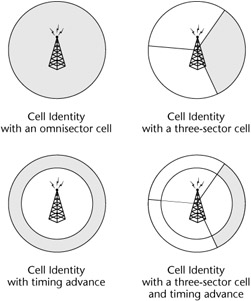 Figure 17.1: Cell Identity and timing advance positioning areas.
Figure 17.1: Cell Identity and timing advance positioning areas.
When these positioning methods are combined, they are commonly referred to as cell global identity-timing advance or CGI-TA. This approach can yield results that are accurate within 100 to 200 meters (100 to 200 yards), quite impressive for such a simple technique that does not require handset or network upgrades. It is also worthwhile to note that the accuracy of CGI-TA is better in cities than in rural areas due to the higher density of base stations in populated areas.
Time of Arrival (TOA)
Even when timing advance information is available, CGI-TA does not provide accurate-enough information for most location-based services. Using a time of arrival (TOA) approach—also known as time difference of arrival (TDOA) or uplink time of arrival (ULTOA)—can dramatically improve the location accuracy. Rather than using one base station to determine the location, TOA uses information gathered from three or more base stations. It works by having the phone send out a signal that is received by all of the base stations within range. Each station then measures the amount of time it took to receive the signal from the time it was sent (T1, T2, T3). These time differences have to be very accurate, requiring all of the base stations to be synchronized. This also requires using either GPS systems for synchronization or an atom clock, both of which are costly solutions.
Since the signal moves at a fixed speed, the distance of the device to the base station can be determined. The distance from a single base station does not help a lot as it is not possible to know in which direction the mobile user is moving. By using the information from three base stations, it is possible to triangulate the coordinates of the user relative to the base stations, as shown in Figure 17.2. Since the base stations are in a fixed location, the relative coordinates can be translated into absolute coordinates that can be used to create LBS.
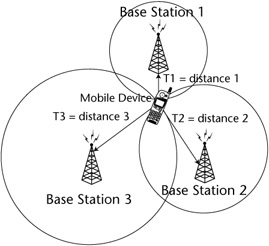
Figure 17.2: Using time of arrival to determine location.
TOA technology does not require any changes to the handset itself. This makes it a potential solution for meeting the E911 Phase II requirements for legacy handsets. The accuracy of this solution is fairly decent, coming in at around 50 meters (50 yards) in urban areas and 150 meters (150 yards) in rural settings.
| Note |
TOA solutions are more practical on CDMA/CDMA2000 networks, as they are already synchronized from the start and do not require using GPS or atom clocks. |
Angle of Arrival (AOA)
Angle of arrival (AOA) works in a similar fashion to TOA, but instead of using the time it takes for a signal to reach three base stations, it uses the angle at which a device's signal arrives at the station. By comparing the angle-of-arrival data among multiple base stations (at least three), the relative location of a device can be triangulated. On its own, AOA is not commonly used, and is rarely discussed with LBS. That said, some systems may use the angle of arrival along with the time of arrival to get an even more accurate location.
Handset-Based Solutions
When more accuracy is needed, handset-based solutions are required. In these solutions the handset participates in the position determination. The accuracy of these technologies allows for the introduction of the third generation of location-based services, where precise location information is required. The two handset-based systems described next use similar ways of calculating location, with one major difference: E-OTD relies on base stations and GPS uses satellites.
Enhanced Observed Time Difference (E-OTD)
Enhanced observed time difference (E-OTD) technology works in a similar way to time of arrival, but the handset makes the time measurements instead of the base stations. E-OTD relies on measuring the time at which signals from the base station arrive at two geographically dispersed locations: the mobile device and a fixed measuring location called the location measuring unit (LMU). For accurate triangulation, at least three base stations have to participate in the calculation.
For this method to work, the participating base stations have to transmit a very accurate clock time to the mobile device. Using this approach, all of the signals have to be sent at the same time because the mobile user may be moving during the measurements. This is where the LMUs come into play. They provide an accurate timing source for the measurements, ensuring the accuracy of the data. Once the measurements are taken, the E-OTD-enabled handset records the time differences from the three base stations. The distance between the mobile device and the base stations can then be calculated by comparing the time differences between the timing measurements. The time difference can be translated into a distance because the signals move at a fixed speed. Once the measurements are taken, the relative location can be calculated on the network or on the handset itself. The handset performs the measurements using a software solution; but in order to perform the calculations, a hardware upgrade is required as well. Once the relative location is determined, it can be translated into an absolute position since the base station coordinates are known. Figure 17.3 depicts the E-OTD positioning system.
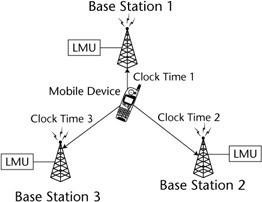
Figure 17.3: E-OTD positioning architecture.
E-OTD provides an accurate and cost-effective way to determine a mobile position. The results are typically accurate within 50 to 100 meters (50 to 100 yards), meeting the FCC E911 Phase II guidelines. As a result, E-OTD has become the de facto standard among U.S. GSM carriers for E911 Phase II implementation.
GPS and A-GPS
Global Positioning System (GPS) is the most popular positioning technology being used today. It uses 24 global satellites that orbit the Earth to send signals to a GPS-enabled receiver. The receiver can communicate with three or four satellites at any single point in time. For this to work, however, there has to be a line of sight between the receiver and the satellites, precluding the use of GPSs inside buildings. Once the receiver obtains the positioning measurements, it can either calculate the location coordinates directly on the device or send the measurement results back to the network server for processing. Similar to E-OTD, the calculations are quite complex and require adequate processing power. If the calculations are to take place on the device, the device manufacturer has to include the appropriate hardware, adding to the device cost. In many product offerings, the GPS receiver is a separate unit that can be connected to a mobile device using a cable hookup or wireless technology such as Bluetooth. This means the GPS unit can include the required hardware, without having a direct impact on the form factor and power consumption of the device. Over the past several years, the size, power consumption, and cost of GPS chipsets have fallen, leading to widespread use of this technology in the mobile environment.
GPS works similar to other triangulation-based positioning technologies. The satellites constantly broadcast signals that can be read by GPS-enabled devices. It is unimportant to the satellite how many devices are receiving the signal because the communication goes in only one direction. The device measures the amount of time it takes for the satellite signals to reach it. This measurement is taken from three distinct satellites to provide precise location information. Mathematically, four measurements are required, but three usually provide sufficient information to give an accurate result. The speed of the signal is known, enabling the GPS to determine the distance from the satellite. As you can imagine, it is very important that these time measurements be incredibly precise. A time calculation that is off by one-thousandth of a second can result is a location variation of over 300 kilometers (200 miles)! For this reason, the GPS receivers use atomic clocks on each satellite to ensure the time is correct. Once the distances have been determined, triangulation calculations are executed to determine the absolute location coordinates. GPS produces very accurate results, typically to within 5 to 40 meters (5 to 40 yards)of the actual location. GPS also provides three-dimensional location information, latitude, longitude, and elevation.
Even though GPS-based systems provide accurate information, they are not terribly versatile. As already mentioned, in order to get a reading, the GPS receiver has to have a line of sight to the satellites. This is a significant limitation for the mobile workforce. Many applications require use inside of buildings or vehicles, making it difficult for GPS to provide the required service. In some cases, this is addressed by incorporating a second positioning technology, typically network-based, along with GPS. For example, a cell identity solution could be used as a backup where a line of sight is not available. A second limitation is the time required to obtain the location information. With standard GPS configurations, this time ranges between 20 to 40 seconds, a delay that could have a negative impact of the usability of the application.
One solution to both the line-of-sight and time delay issues is network-assisted GPS or A-GPS. A-GPS uses modified handsets that receive the GPS signals and then send those readings to a network server. The server uses network-based GPS receivers to help the handset measure the GPS data. The network GPS receivers are placed around the network several hundred kilometers apart. They regularly collect GPS satellite data and provide this data to the handsets, enabling them to make timing measurements without having to decode the actual satellite messages. This makes a substantial difference in the time it takes to get the location information. Using A-GPS, the time is typically between one and eight seconds.
To alleviate the line-of-sight restriction, the handsets send the measurement information to network servers, so that complex computations can be done away from the device. This extra computing power allows for multipath mitigation and signal processing techniques to locate devices indoors and other locations that are challenging for conventional GPS. Figure 17.4 demonstrates the A-GPS architecture.
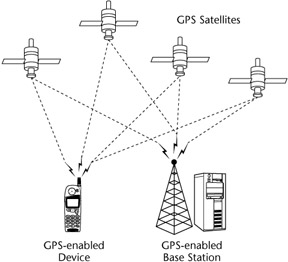
Figure 17.4: A-GPS architecture.
GPS receivers are commonly used in conjunction with a Geographic Information System (GIS; described in the next section) to provide a complete topographic view of different areas in the country. One of the most common GPS applications is for vehicle positioning and tracking services. These services require more than just position to make them functional. That is where a Geographic Information System becomes useful.







